

轉子的動平衡技術2
發布時間:
2024-07-03 17:36
01
不平衡的表示方法
我們把改變不平衡旋轉體的質量分布來消除旋轉軸周圍的離心力作用,使轉子達到運轉平穩的這個過程稱為“平衡”。
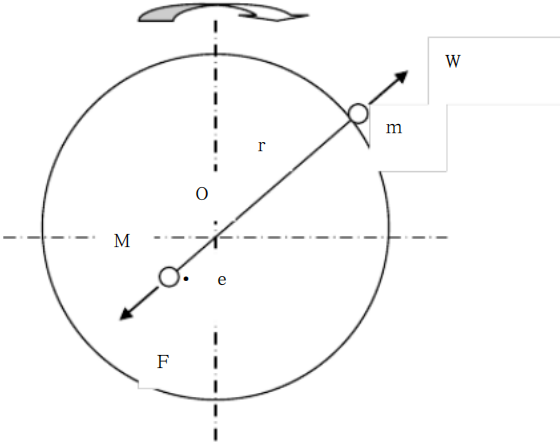
圖 8、動平衡試驗示意圖
如上圖8所示,有一總質量為M的圓盤,其重心和旋轉中心的距離(偏心距)為e,原始不平衡產生的離心力為F。如在相反方向上半徑為r處加一平衡質量m,它所產生的離心力為W,假如F=W,則轉子達到完全平衡,即
F=W=Me ω2=mr ω2
在實際平衡試驗過程中,達到轉子完全平衡是不可能的。因此經過動平衡后各種轉子的允許殘余不平衡量怎樣要求,也就是確定平衡 精度等級的依據是什么。從統計來求算故障的實際經驗中表明,對于同類型的轉子(即幾何相似的轉子),允許的剩余不平衡度e與轉速 ω成反比,這種關系可以表示為
eω=G
式中
e——轉子質量重心和旋轉中心的偏心距, [ mm] ;
ω——轉子的旋轉角速度, [ 1/s ] ;
G——轉子的平衡精度等級, [ mm/s ] 。
上式中的G從物理概念上理解,是轉子質量中心的線速度。 很明顯,如果轉子質量重心線速度越大,則轉子的振動也就越激烈;轉子質量重心線速度越小,則轉子旋轉也就越平穩。
各類剛性轉子的平衡精度等級
| 平衡精度等級G | eω[mm/s] | 轉 子 類 型 |
| G4000 | 4000 | 剛性安裝的具有奇數汽缸的慢速船用才油機的曲軸傳動裝置 |
| G1600 | 1600 | 剛性安裝的大型兩沖程發動機的曲軸傳動裝置 |
| G630 | 630 | 剛性安裝的大型四沖程發動機的曲軸傳動裝置,彈性安裝的船 用柴油機曲軸傳動裝置 |
| G250 | 250 | 剛性安裝的高速四缸柴油機曲軸傳動裝置 |
| G100 | 100 | 具有六個或更多汽缸的高速柴油機的曲軸傳動裝置;汽車、卡車和機車的發動機總成(汽油機或柴油機) |
| G40 | 40 | 汽車輪胎、傳動軸、剎車鼓以及彈性安裝的具有六個或更多汽缸的高速四沖程的發動機(汽油機或柴油機)曲軸傳動裝置;汽車、卡車和機車的曲軸傳動裝置 |
| G16 | 16 | 具有特殊要求的傳動軸 (推進器、 萬象聯軸節軸) ;破碎機零件;農業機械零件;汽車和機車發動機(汽油機或柴油機)部件;特殊要求的六缸或六缸以上的發動機部件 |
| G6.3 | 6.3 | 作業機械的零件;船用主汽輪機齒輪;離心機鼓輪;風扇;組合式航空燃氣輪機轉子;泵轉子;機床和一般的機械零件;普通電機轉子;特殊要求的發動機部件 |
| G2.5 | 2.5 | 蒸汽渦輪機,包括船用(商船用)主要剛性渦輪發動機轉子;剛性汽輪發電機轉子;透平壓縮機;機床傳動裝置;特殊要求的中型和大型電機轉子;透平驅動泵 |
| G1 | 1 | 磁帶記錄儀和留聲機傳動裝置;磨床傳動裝置;具有特殊要求的小型電機轉子 |
| G0.4 | 0.4 | 精密磨床的傳動軸,砂輪盤和電極轉子;陀螺轉子 |
國際標準化組織所制定的“剛性轉子平衡精度”標準ISO1940,就是以G值來劃分精度等級的,G值范圍從0.16到4000mm/s,共分成11個等級,每個等級彼此按2.5倍分隔,例如:G值范圍從0.16~0.4mm/s,記為G0.4;G值范圍從0.4~1mm/s,記為G1,余類推。上表給出了各種類型剛性轉子的平衡精度等級,可供確定轉子允許殘余不平衡度時使用。如果確定了轉子的平衡精度等級,即給定了G值之后,已知工作轉速ω,就可以計算出轉子的允許不平衡度e。對于給定質量M的轉子,則可計算出允許的不平衡量(不平衡力矩)。
02
剛性轉子平衡
從轉子平衡觀點看,工作中的轉子可分為剛性轉子和撓性轉子兩類。轉子在較低轉速下運轉時(一般認為工作轉速低于其一階臨界轉速的0.5倍),由于離心力產生的轉子動撓度變形很小,可以忽略不計,轉子可以看作不發生變形的“剛體”,這種轉子稱為剛性轉子。但在高轉速時(工作轉速超過一階臨界轉速的0.7倍),由于分布在軸向不同位置上的不平衡離心力作用,轉子產生很大的撓曲變形,
軸向彎矩增大,軸承振動也隨之增大,這種轉子就不能視為“剛體”,稱為撓性轉子。
大部分剛性轉子按照其厚度不同、結構形式和平衡工藝的要求不同,分為靜平衡和動平衡兩種方法。靜不平衡的轉子所產生的不平衡作用力是在重心所在的徑向平面上,可以經過動平衡或單純做靜平衡實驗加以消除。
最簡單的靜平衡試驗方法,是把轉子軸徑置于兩根摩檫系數很小的水平導軌上滾動,利用轉子上重的部分處于最低位置時滾動便停止的原理,在相反的方向上配置適當平衡塊,使轉子在任何位置均不發生自由滾動,就達到了平衡目的。
滾動法不能直接測出靜不平衡量,因此測量工作效率低。靜平衡的另一種形式是天平法,它是利用轉子重心對刃形支撐、扭形支撐或彈簧支點形成偏心的原理,產生力矩使框架傾斜,此時調整平衡砣使框架回到水平位置上,從而由平衡砣的移動量可求出靜不平衡量。
靜不平衡的校正通常適用于下列情況的轉子:
(1)轉子的形狀為薄圓盤,例如單級泵葉輪、風扇葉片、 飛輪、皮帶輪等,這類轉子的回轉體件的外徑D與長度l之比滿足D/l≥5,此時,認為偶不平衡很小,所以實用上只須做靜平衡試驗。
(2)對于大型減速齒輪等焊接結構轉子的不平衡量很大, 突然旋轉轉子有危險,在做動平衡前需要預先消除靜 不平衡。
(3)對于已經成型的砂輪等不易進行動平衡的轉子,或者 由于制造上受轉子結構限制而無法進行動平衡的轉子,一定要預先消除靜不平衡。靜平衡的校正平面位置最好通過轉子質心,否則校正質量與轉子的初始不平衡會形成偶不平衡, 轉子旋轉時將對軸承產生動反力。
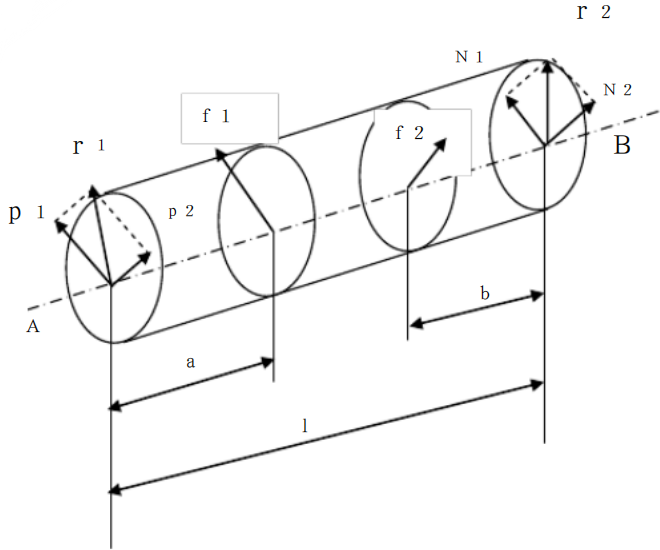
圖 9、寬度較大的剛性轉子動平衡原理示意圖
如圖 9 所示,對于寬度較大的剛性轉子應采用動平衡方法來解決不平衡問題。多數寬轉子的不平衡狀態是由靜不平衡和偶不平衡兩種基本類型疊加而成,疊加后的轉子動不平衡通常可以在兩個任意選定的校正平面上(一般選在靠近兩側軸承處),用等效不平衡矢量來代替,然后在這兩個平面上對其合力進行校正。
圖 9 所示的剛性轉子進行兩個平面平衡的原理, 在兩不平衡的薄圓盤上,其不平衡離心力為f和f2,力方向如圖所示。現選A、B兩個面為校正平面。由理論力學可知,一個力可以分解為與它相平行的兩個分力。將f 1按力的簡化法則分解為通過A、B兩點的平行力P1和N1,則
P1 =(l-a)f 1/l
N1 =af 1/l
f2將f2按力的簡化法則分解為通過A、B兩點的平行力P 2 和N2,則
P2 =bf 2/l
N2 =(l-b)f 2/l
將A平面內的分力P 1和P2 合成為力r 1,將B平面內的分力N 1 和N2合成為力r 2 。r1 和r2對于剛性轉子是等價于f 1和f 2的,因此在r1和r2的作用點上加上大小相等、方向相反的力即可將轉子平衡。按照這個方法, 可已將任何一個不平衡的剛性轉子, 通過兩個與轉子軸線相垂直的平面進行校正而得到平衡, 這就是剛性轉子的兩面平衡原理.普通低速動平衡機就是根據兩面平衡的原理進行平衡的。
在采用平衡精度等級推薦數值時,應注意下列不同的情況:
1、 對于靜不平衡的回轉體,許用不平衡量取由表中計算出的值。
2、 對于動不平衡的回轉體,由表中求出許用偏心距e,并根據mr=Me求出許用不平衡重徑積后,應將它分配到兩個平衡基面上。一般情況下,將其平分為兩部分,分別作為兩平衡基面上的許用不平衡重徑積就可以了。
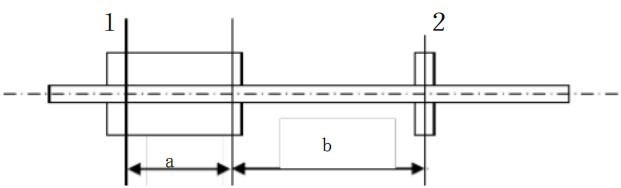
當兩平衡基面對零件的重心并不對稱時(如圖 10 所示),則兩平衡基面上的許用不平衡重徑積可按下式求得:
相關新聞
2024-07-03
平衡機發展迄今已經有一百多年的歷史。1866年,德國西門子公司發明了發電機。4年后,加拿大人Henry Martinson申請了平衡技術的專li ,拉開了平衡校正產業的序幕。
2024-07-03
電機轉子裝配工的一般操作規程如下: 1、工作前,整理場地,放穩各零、部件,并檢查裝配使用工具和工作環境是否安全良好。 2、吊放電機機座、底板、定子、轉子、軸承等大型部件時必須放好方箱或墊木...
廣州卓玄金機械設備有限公司
傳真:020-36969822
地址:廣東省廣州市花都區大華大街34號(廣州卓玄金機械設備有限公司)

關注我們
Copyright ? 2022 廣州卓玄金機械設備有限公司