械設(shè)備有限公司")
轉(zhuǎn)子動力學(xué)建模分析
發(fā)布時間:
2024-07-03 17:37
轉(zhuǎn)子材料的不均勻、制造誤差、結(jié)構(gòu)的不對稱等諸因素導(dǎo)致轉(zhuǎn)子在旋轉(zhuǎn)時會產(chǎn)生離心慣性力組成一個空間力系,使轉(zhuǎn)子動不平衡。當(dāng)試件上有不平衡質(zhì)量存在時,試件以角速度ω轉(zhuǎn)動后產(chǎn)生離心慣性力 F = mrω2,它可以分成垂直分力Fy和水平分力 Fx,由于平衡機(jī)的工字型板簧和擺架在水平方向(繞 y 軸)抗彎剛度很大,所以水平分力 Fx 對擺架的振動影響很小可忽略不計。而在垂直方向上(繞 x 軸)的抗彎剛度小,因此在垂直分力產(chǎn)生的力矩的作用下,使擺架產(chǎn)生周期性的上下振動。因此,動平衡機(jī)可簡化為自由度為2的線性受迫振動系統(tǒng)。設(shè)轉(zhuǎn)子質(zhì)量為 M ,對過質(zhì)心且垂直于紙面的軸的轉(zhuǎn)動慣量為 J,不平衡量的質(zhì)量分別為 m1、m2,板簧和彈簧勁度系數(shù)分別為k1、k2,轉(zhuǎn)子與不平衡量的相對位置如圖 1 所示。
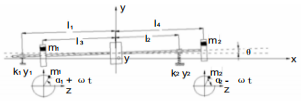
圖 1 轉(zhuǎn)子-支撐振動系統(tǒng)動力學(xué)模型
設(shè)初始狀態(tài)時系統(tǒng)水平,過質(zhì)心建立坐標(biāo)系。在運(yùn)動的某一時刻,轉(zhuǎn)子質(zhì)心沿 y 軸方向的位移為 y,轉(zhuǎn)角為 θ,板簧相對于初始位置的伸長量分別為 y 1、y 2。可得轉(zhuǎn)子運(yùn)動微分方程:
 (1)
(1)
式 1 中
r1—— m1 距回轉(zhuǎn)中心的半徑
r2—— m2 距回轉(zhuǎn)中心的半徑
 (2)
(2)
將 2 式代入 1 式整理可得 3 式
 (3)
(3)
 (4)
(4)
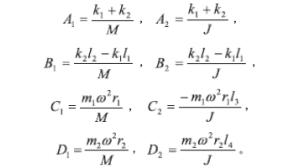
式 4 中
1)解方程組 4 所對應(yīng)的齊次方程組,可得 y與 θ的 固 有 角 頻 率 p1、p2 均 為 方 程 p4 - ( A1 +A2)p2 + A 1A 2 - B1B2 = 0 的兩正根:
 (5)
(5)
由式 5 可知,動平衡實(shí)驗(yàn)機(jī)振動系統(tǒng)的固有頻率和 M 、k 1、k 2、m1、 m2、J 參數(shù)有關(guān)。
2)令轉(zhuǎn)子質(zhì)心位移 y 和轉(zhuǎn)角 θ如式 6、7 所示。
 (6)
(6)
 (7)
(7)
代入原方程組可解得轉(zhuǎn)子質(zhì)心位移 y 和轉(zhuǎn)角 θ的一組特解:
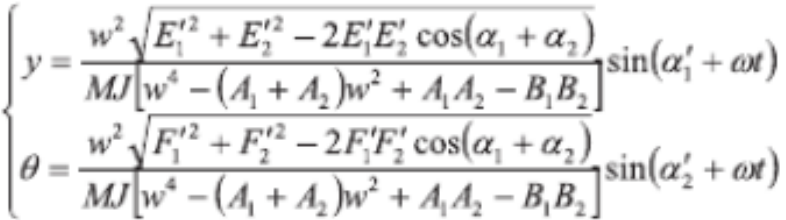 (08)
(08)
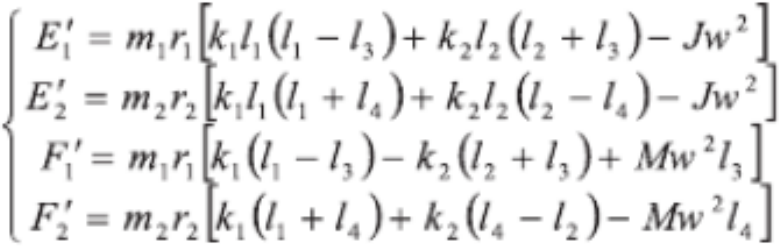
其中, α1′和 α2′為相關(guān)常數(shù),式中
相關(guān)新聞
2024-07-03
平衡機(jī)發(fā)展迄今已經(jīng)有一百多年的歷史。1866年,德國西門子公司發(fā)明了發(fā)電機(jī)。4年后,加拿大人Henry Martinson申請了平衡技術(shù)的專li ,拉開了平衡校正產(chǎn)業(yè)的序幕。
2024-07-03
電機(jī)轉(zhuǎn)子裝配工的一般操作規(guī)程如下: 1、工作前,整理場地,放穩(wěn)各零、部件,并檢查裝配使用工具和工作環(huán)境是否安全良好。 2、吊放電機(jī)機(jī)座、底板、定子、轉(zhuǎn)子、軸承等大型部件時必須放好方箱或墊木...
2024-07-03
主要應(yīng)用于各類家用電器、散熱風(fēng)扇、電機(jī)轉(zhuǎn)子、發(fā)電機(jī)轉(zhuǎn)子、水泵轉(zhuǎn)子、汽車、印刷、滾筒等行業(yè)高速旋轉(zhuǎn)工件的平衡校正。
2024-07-03
你還在用傳統(tǒng)平衡機(jī),看看卓玄金高新技術(shù)平衡機(jī)吧
廣州卓玄金機(jī)械設(shè)備有限公司-專業(yè)動平衡機(jī)制造商 各類平衡機(jī)為您量身定制 ?免費(fèi)上門安裝調(diào)試 長年保修
2024-07-03
主要應(yīng)用于各類家用電器、散熱風(fēng)扇、電機(jī)、發(fā)電機(jī)、水泵、汽車、印刷、滾筒等行業(yè)高速旋轉(zhuǎn)工件的平衡校正。
廣州卓玄金機(jī)械設(shè)備有限公司
傳真:020-36969822
地址:廣東省廣州市花都區(qū)大華大街34號(廣州卓玄金機(jī)械設(shè)備有限公司)
注我們")
關(guān)注我們
Copyright ? 2022 廣州卓玄金機(jī)械設(shè)備有限公司
械設(shè)備有限公司")
關(guān)鍵詞: 全自動系列 智能定位系列 自驅(qū)動整機(jī)系列 通用型系列